



PILOT-H PRO es la versión proporcional avanzada del sistema inalámbrico de control remoto para yates Maritronix PILOT-H. Está diseñado para propietarios de embarcaciones, patrones, astilleros, instaladores, talleres náuticos y profesionales marinos que necesitan un control más preciso a baja velocidad durante el atraque, desatraque, fondeo, amarre, atraque de popa y maniobras en espacios reducidos.
En comparación con el sistema PILOT-H estándar, PILOT-H PRO añade un control proporcional de motor de dos etapas calibrado. La primera etapa del botón se utiliza normalmente para un engranaje suave de la marcha a velocidad de ralentí, mientras que la segunda etapa proporciona un nivel de empuje calibrado más fuerte cuando se requiere potencia adicional para maniobrar.
El transmisor PILOT-H PRO utiliza botones de control de motor de dos etapas. Cada botón de motor tiene dos puntos de presión, lo que permite al patrón activar dos niveles de respuesta proporcional calibrada con el mismo botón.
Esto hace que PILOT-H PRO sea especialmente adecuado para yates más pesados, embarcaciones con alta superficie expuesta al viento, espacios de marina estrechos, atraque de popa, corrección de viento, corrección de corriente y situaciones donde no basta con el simple control de engranaje conectado / desconectado.
Control inalámbrico proporcional de yate para maniobras más precisas
PILOT-H PRO está desarrollado para situaciones en las que el simple engranaje del motor a velocidad de ralentí no siempre es suficiente. Durante el atraque, atraque de popa, desplazamiento lateral, corrección de viento, corrección de corriente, fondeo y maniobras en marinas estrechas, el patrón a menudo necesita más de un nivel de respuesta del motor.
La versión PRO añade una función de control proporcional del motor de dos etapas calibrado. La primera etapa se utiliza normalmente para un engranaje suave de la marcha a velocidad de ralentí. La segunda etapa puede configurarse para proporcionar una respuesta del motor más fuerte, por ejemplo, ralentí más un valor de RPM calibrado adicional, dependiendo del sistema de control del motor, la configuración del gateway, la interfaz analógica y la configuración de la embarcación.
Esto proporciona al patrón una mejor autoridad de control al maniobrar la embarcación de forma lenta y precisa. Es especialmente útil para embarcaciones más pesadas, yates con alta superficie expuesta al viento, embarcaciones con hélices de proa o popa potentes, e instalaciones donde se requiere un control de empuje más preciso durante el funcionamiento a baja velocidad.
Respuesta proporcional del motor en dos etapas
La principal ventaja de PILOT-H PRO es su respuesta proporcional del motor en dos etapas calibrada. A diferencia de un simple mando a distancia inalámbrico para yates con encendido/apagado, PILOT-H PRO permite al patrón ordenar dos niveles de respuesta del motor diferentes desde el mismo botón de control de motor.
El transmisor PILOT-H PRO utiliza botones de control de motor de dos etapas. Cada botón de motor tiene dos puntos de presión, lo que permite al patrón activar dos niveles de respuesta proporcional calibrada con un solo botón.
Una pulsación normal activa la primera etapa, que se utiliza habitualmente para un engranaje suave a velocidad de ralentí. Pulsar el mismo botón hasta el segundo punto de presión activa la segunda etapa, proporcionando una respuesta del motor calibrada más fuerte cuando se requiere empuje adicional para maniobrar.
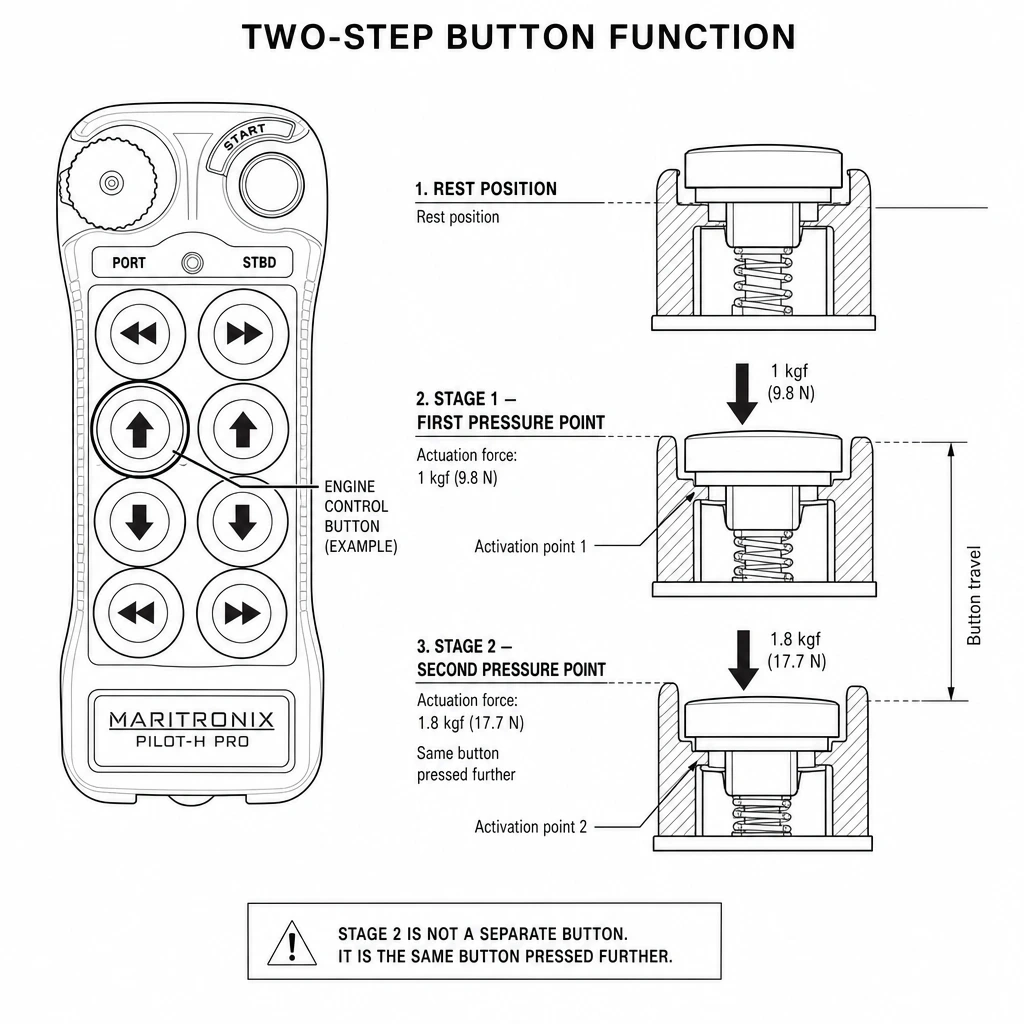
Etapa 1: activada con una pulsación normal del botón de control de motor, normalmente utilizada para un engranaje suave a velocidad de ralentí.
Etapa 2: activada al pulsar el mismo botón hasta el segundo punto de presión, proporciona una respuesta proporcional del motor calibrada más fuerte cuando se requiere empuje adicional.
Esta respuesta proporcional de dos etapas está pensada para ofrecer al patrón un mejor control al mover la embarcación de forma lenta y precisa. Puede ser útil al atracar con viento, corregir la posición de la embarcación cerca de un pantalán, acercarse a un cabo de amarre, maniobrar en espacios de marina estrechos o controlar la embarcación desde fuera de la posición de gobierno principal.
Los niveles exactos de respuesta proporcional dependen del sistema de control del motor, la interfaz del acelerador, el tipo de gateway, la interfaz analógica, la calibración y la configuración de la embarcación. Antes de la entrega, Maritronix comprueba el sistema de acelerador instalado, el número de motores, la disposición de los puestos de gobierno, la configuración de las hélices de maniobra y los puntos de conexión disponibles para seleccionar el método de integración adecuado.
Disposición de los botones del transmisor PILOT-H PRO
El diagrama numerado del transmisor muestra la disposición estándar de los botones de PILOT-H PRO. Se utilizan números en lugar de nombres de función impresos para que la misma ilustración técnica pueda emplearse en distintas versiones idiomáticas del manual de usuario y la documentación del producto.
Dependiendo de la configuración del sistema seleccionada, el transmisor PILOT-H PRO puede controlar los motores principales, la hélice de proa, la hélice de popa, el molinete de ancla, la bocina y funciones adicionales configuradas. La asignación exacta de los botones puede variar según la configuración de la embarcación y el equipamiento instalado.
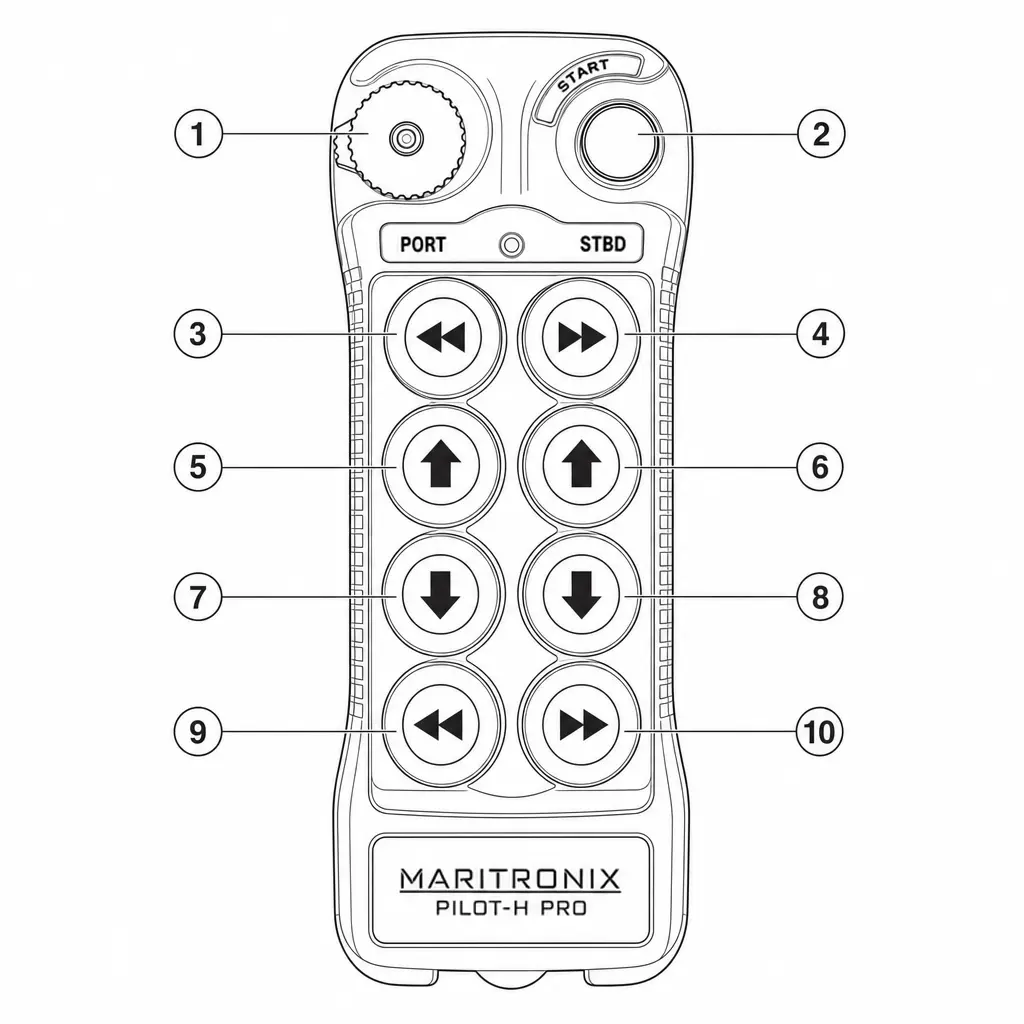
| N.º | Función de botón / control | Etapa 1 | Etapa 2 |
| 1 | Botón STOP / OFF | Apaga o detiene el sistema de control remoto. | No aplicable. |
| 2 | Botón START / botón de función | Activa el sistema. | No aplicable. Este botón también puede usarse como botón de función para combinaciones especiales. |
| 3 | Hélice de proa a babor | Hélice de proa a babor, primer nivel de respuesta. | Hélice de proa a babor, segundo nivel de respuesta si lo permite la instalación. |
| 4 | Hélice de proa a estribor | Hélice de proa a estribor, primer nivel de respuesta. | Hélice de proa a estribor, segundo nivel de respuesta si lo permite la instalación. |
| 5 | Motor de babor avante | El motor de babor engrana la marcha avante a velocidad de ralentí. | Motor de babor avante con RPM preestablecidas más altas, calibradas durante la instalación. |
| 6 | Motor de estribor avante | El motor de estribor engrana la marcha avante a velocidad de ralentí. | Motor de estribor avante con RPM preestablecidas más altas, calibradas durante la instalación. |
| 7 | Motor de babor atrás | El motor de babor engrana la marcha atrás a velocidad de ralentí. | Motor de babor atrás con RPM preestablecidas más altas, calibradas durante la instalación. |
| 8 | Motor de estribor atrás | El motor de estribor engrana la marcha atrás a velocidad de ralentí. | Motor de estribor atrás con RPM preestablecidas más altas, calibradas durante la instalación. |
| 9 | Hélice de popa a babor | Hélice de popa a babor, primer nivel de respuesta. | Hélice de popa a babor, segundo nivel de respuesta si lo permite la instalación. |
| 10 | Hélice de popa a estribor | Hélice de popa a estribor, primer nivel de respuesta. | Hélice de popa a estribor, segundo nivel de respuesta si lo permite la instalación. |
Para el control del motor, la Etapa 1 se utiliza normalmente para un engranaje suave a velocidad de ralentí. La Etapa 2 proporciona una respuesta del motor calibrada más fuerte aumentando las RPM hasta un valor preestablecido durante la instalación. Esto permite al patrón usar maniobras suaves a ralentí o un empuje más fuerte desde el mismo botón.
En una configuración típica, el molinete de ancla puede controlarse pulsando y manteniendo el botón START y, a continuación, pulsando uno de los botones de la hélice de proa. Manteniendo el botón 2 junto con el botón 3 o el botón 4 se puede subir o bajar la cadena del ancla, dependiendo de la configuración de instalación seleccionada.
La asignación exacta de los botones y el comportamiento de la Etapa 2 pueden variar según la configuración de la embarcación, el equipamiento instalado, la interfaz de control del motor, el sistema de hélices, el cableado del molinete de ancla, el cableado de la bocina y la configuración seleccionada de PILOT-H PRO.
Diseñado para sistemas electrónicos modernos de control de motor marino
PILOT-H PRO está diseñado para integrarse con sistemas modernos de control de motor marino, sistemas electrónicos de acelerador y cambio, arquitecturas de control basadas en CAN-Bus, sistemas de propulsión preparados para joystick, sistemas de control de motor analógicos e interfaces específicas para cada sistema de motor.
El sistema no está pensado para sustituir el sistema de control de motor original. En su lugar, se integra como una interfaz de control adicional y protegida. El puesto de gobierno original, las palancas del acelerador, el sistema de joystick, la electrónica del motor, el control de transmisión, las funciones de diagnóstico y la lógica de seguridad de a bordo permanecen activos cuando el método de integración seleccionado lo permite.
PILOT-H PRO puede integrarse con una amplia gama de sistemas de control de motor marino, incluidos Volvo Penta, Yanmar, Cummins, Mercury MerCruiser, MAN, Suzuki, Honda, Caterpillar, Yamaha, ZF Marine, Twin Disc, Glendinning, NHK MEC, Dometic SeaStar, Kobelt, Flexball, Ultraflex y otros sistemas electrónicos o analógicos marinos compatibles.
Diseñado para no eludir la lógica original de control del motor
PILOT-H PRO está diseñado para funcionar como una interfaz de control externa adicional para el atraque de yates, maniobras en espacios reducidos y control proporcional del motor a baja velocidad. El sistema no está pensado para sustituir los controles originales del puesto de gobierno, las palancas del acelerador, el sistema de joystick, la unidad de control del motor, el sistema de control de transmisión ni las funciones de seguridad de a bordo existentes.
Cuando hay módulos gateway compatibles, interfaces analógicas o mazos de cables plug-and-play disponibles, PILOT-H PRO puede integrarse sin eludir la arquitectura de control original de la embarcación. Esto ayuda a conservar la lógica de control original del fabricante, el comportamiento de diagnóstico, el acceso para servicio y el funcionamiento normal del puesto de gobierno.
Este enfoque es especialmente importante en yates modernos controlados electrónicamente, en los que los motores, las cajas de cambios, los sistemas de joystick, los puestos de gobierno y los módulos de control de propulsión se comunican mediante procesadores de control dedicados, redes CAN-Bus o interfaces específicas del fabricante.
Sistemas de control de motor y interfaces gateway compatibles con PILOT-H PRO
PILOT-H PRO no se limita a una sola marca de motor. El sistema puede integrarse con una amplia gama de sistemas de control de motor marino, sistemas electrónicos de acelerador y cambio, palancas de acelerador, sistemas de joystick, arquitecturas de control basadas en CAN-Bus, sistemas de control analógicos e interfaces electrónicas de control de propulsión.
Dependiendo de la configuración de la embarcación, Maritronix puede utilizar interfaces originales del fabricante, interfaces de conexión específicas del fabricante, módulos gateway Maritronix dedicados, interfaces CAN-Bus, interfaces de señal analógica o mazos de conexión plug-and-play preparados especialmente.
Para instalaciones Volvo Penta, PILOT-H PRO puede adaptarse a los sistemas de control Volvo Penta EDC y EVC compatibles. Para los sistemas EVC-E y más recientes compatibles, la integración puede realizarse a través de las interfaces originales Volvo Penta TJS Gateway cuando la configuración de la embarcación lo permite. La compatibilidad depende del puesto de gobierno instalado, los controles del acelerador, el sistema de joystick, la versión de software, la disposición de la propulsión y los puntos de conexión disponibles.
| Fabricante | Sistema de control / modelo de acelerador compatible | Interfaz de integración PILOT-H PRO | Estado de integración |
| Volvo Penta | EDC, EVC-B, EVC-C, EVC-D, EVC-E y sistemas EVC más recientes, EVC 2.0, EVC E4, sistemas IPS compatibles y sistemas Volvo Penta preparados para joystick | Interfaz Maritronix / interfaz original Volvo Penta TJS Gateway cuando es compatible | Integrado por Maritronix según el sistema de control Volvo Penta instalado y la configuración de la embarcación |
| Yanmar | VC10, VC20, VC30 Vessel Control Systems | Interfaz Yanmar VC Gateway / CAN-Bus | Integrado por Maritronix para sistemas de control Yanmar VC compatibles |
| Suzuki Marine | Suzuki Precision Control, SPC 1.0, SPC 2.0 | Interfaz Suzuki SPC Gateway / CAN-Bus | Integrado por Maritronix para sistemas Suzuki Precision Control compatibles |
| Mercury / MerCruiser | SmartCraft DTS, Digital Throttle & Shift, Next Gen DTS, Axius, Joystick Piloting systems | Interfaz Mercury SmartCraft DTS Gateway | Integrado por Maritronix para sistemas de control electrónico Mercury y MerCruiser compatibles |
| Yamaha | Digital Electronic Control, Command Link Plus, Helm Master, Helm Master EX | Interfaz Yamaha DEC / Helm Master Gateway | Integrado por Maritronix para sistemas de control electrónico Yamaha compatibles |
| Honda Marine | iST Intelligent Shift & Throttle | Interfaz Honda iST Gateway | Integrado por Maritronix para sistemas de control Honda iST compatibles |
| Cummins / Zeus | Controles electrónicos Cummins, sistemas basados en SmartCraft, sistemas de joystick Zeus | Interfaz Cummins / Zeus Gateway | Integrado por Maritronix según la configuración del sistema de control instalado |
| Caterpillar | Controles electrónicos de propulsión Cat Marine, MPC100, MPC300 | Interfaz Caterpillar Marine Control | Integrado por Maritronix según la configuración del sistema de control instalado |
| MAN Marine | MAN iSea, sistemas electrónicos de control de motor MAN, sistemas basados en MMDS | Interfaz MAN Marine Control | Integrado por Maritronix según la configuración del sistema de control instalado |
| MTU / Rolls-Royce Power Systems | Sistemas de control MTU BlueVision, BlueVision NG, mtu NautIQ | Interfaz MTU / NautIQ Control | Integrado por Maritronix según la configuración del sistema de control instalado |
| ZF Marine | MicroCommand, MicroCommander, ClearCommand, MiniCommand, CruiseCommand, SmartCommand, TotalCommand | Interfaz electrónica de control ZF / Interfaz ZF Gateway | Integrado por Maritronix para sistemas de control electrónico ZF Marine compatibles |
| Twin Disc | Power Commander, EC300, EC300JS, Express Joystick System | Interfaz electrónica de control Twin Disc | Integrado por Maritronix para sistemas de control electrónico de propulsión Twin Disc compatibles |
| Glendinning | Complete Controls, EEC-3, EEC-4, Smart Actuator systems, ProPilot | Interfaz Glendinning Complete Controls | Integrado por Maritronix para sistemas de control Glendinning compatibles |
| NHK MEC | Controles electrónicos de motor KE-4XG, KE-5XG, KE-6+, KE-7+ | Interfaz electrónica de control NHK MEC | Integrado por Maritronix para sistemas de control electrónico NHK MEC compatibles |
| Dometic / SeaStar | Sistemas de joystick y dirección/control electrónico i7700, i7800, Optimus 360 | Interfaz Dometic / SeaStar Control | Integrado por Maritronix según la configuración del sistema de control instalado |
| Kobelt | Sistemas de control electrónico de motor marino Kobelt | Interfaz electrónica de control Kobelt | Integrado por Maritronix según la configuración del sistema de control instalado |
| Flexball / Ultraflex | Sistemas de control electrónico de acelerador y cambio Flexball y Ultraflex | Interfaz Flexball / Ultraflex Control | Integrado por Maritronix según la configuración del sistema de control instalado |
La tabla anterior muestra los sistemas de control de motor marino más habituales compatibles con PILOT-H PRO. Para obtener la lista completa y actualizada de palancas de acelerador, sistemas electrónicos de control, sistemas de joystick, interfaces analógicas e interfaces gateway compatibles, descargue la lista completa de controles compatibles.
La compatibilidad depende del modelo exacto de control del motor, la versión del software, la disposición del puesto de gobierno, el número de motores, el sistema de joystick, la configuración de hélices, los puntos de conexión disponibles y la configuración necesaria de respuesta proporcional del motor en dos etapas de PILOT-H PRO. Antes de la entrega, Maritronix comprueba la palanca del acelerador instalada, el joystick, el procesador de control, la interfaz del motor, la hélice de proa, la hélice de popa y los controles del molinete de ancla para seleccionar el método de integración correcto de PILOT-H PRO.
Integración gateway respetuosa con la garantía y sin fisuras
Para los sistemas de propulsión electrónicos modernos, PILOT-H PRO puede integrarse mediante módulos gateway Maritronix dedicados. Estos gateways proporcionan una interfaz segura, fiable y específica para cada sistema de motor entre el sistema PILOT-H PRO y la arquitectura de control de motor original.
La integración del gateway está diseñada para preservar la arquitectura de control de motor original y favorecer una instalación respetuosa con la garantía cuando el sistema se instala correctamente según los requisitos de instalación aplicables. El método de integración está pensado para evitar modificaciones innecesarias de la red de control del motor original.
El gateway actúa como una interfaz protegida entre PILOT-H PRO y el sistema de control del motor original. Separa el sistema de control inalámbrico de la electrónica del motor y de otros componentes de control de a bordo, manteniendo intacto el sistema original del fabricante.
Como resultado, el sistema de control del motor original puede seguir funcionando con normalidad. El método de integración está diseñado para ayudar a evitar alarmas innecesarias, códigos de avería, errores de diagnóstico o interferencias con las funciones originales de diagnóstico y seguridad.
Los concesionarios autorizados de motores y los técnicos de servicio pueden seguir diagnosticando, manteniendo y reparando el sistema del motor utilizando las herramientas y procedimientos estándar del fabricante, igual que harían en una embarcación sin PILOT-H PRO instalado.
Tratamiento cuidadoso de las señales analógicas de control del motor
Para embarcaciones equipadas con sistemas de control de motor analógicos, PILOT-H PRO está diseñado para tratar las señales analógicas con especial cuidado y precisión. En lugar de generar señales de control simples basadas en PWM, el sistema utiliza componentes que producen señales analógicas reales para ofrecer salidas de mando suaves y estables a la interfaz de control del motor.
Componentes electrónicos de alta velocidad, filtrado de señales dedicado y monitorización continua de las señales ayudan a garantizar un comportamiento de control limpio, estable y predecible. Esta cuidadosa arquitectura de señal analógica reduce el riesgo de errores de control del motor no deseados, ruido de señal o comportamiento inestable del acelerador.
En instalaciones analógicas compatibles, PILOT-H PRO también puede admitir una respuesta de motor calibrada en dos etapas, permitiendo al patrón utilizar una primera etapa de baja velocidad y una segunda etapa más fuerte cuando la configuración de la embarcación lo permite.
Receptor compacto para una instalación sencilla en puestos de gobierno modernos
El receptor PILOT-H PRO está diseñado para ser compacto y fácil de instalar, incluso en puestos de gobierno modernos donde el espacio libre detrás del salpicadero, los paneles de control o los compartimentos eléctricos suele ser limitado.
Con unas dimensiones de solo 160 × 160 × 70 mm, el receptor puede instalarse en muchas zonas del puesto de gobierno sin necesidad de grandes modificaciones ni espacio de instalación adicional. Este tamaño compacto es especialmente útil en embarcaciones y yates más nuevos, donde el espacio detrás del puesto de gobierno suele estar ocupado por pantallas, módulos de control, mazos de cables, electrónica de navegación, sistemas de joystick, paneles de interruptores y componentes de control del motor.
El diseño compacto del receptor ayuda a que la instalación sea más limpia, rápida y sencilla, manteniendo al mismo tiempo la arquitectura de seguridad de grado industrial, la lógica de control inalámbrico, la integración con gateway y la flexibilidad de conexión necesarias para las instalaciones marinas profesionales.
Instalación sencilla plug-and-play
PILOT-H PRO está concebido para una instalación limpia y sencilla. Cada sistema puede suministrarse con un manual de instalación detallado y conectores plug-and-play preparados individualmente para el sistema de control de motor y la configuración de la embarcación específicos.
Para muchos sistemas de control de motor compatibles, PILOT-H PRO puede suministrarse con mazos de conexión preparados, módulos gateway, interfaces analógicas o cables de interfaz plug-and-play. Esto permite una instalación limpia y reversible y reduce la necesidad de cortar, empalmar o modificar de forma innecesaria el cableado original de la embarcación.
Para una configuración normal no se requieren conocimientos de programación, cables de diagnóstico especiales, software externo ni aplicaciones móviles. El proceso de instalación es claro, práctico y está pensado para electricistas marinos profesionales, instaladores, astilleros y propietarios de embarcaciones con conocimientos básicos de electricidad.
El sistema está diseñado para instalarse sin cambiar el funcionamiento normal del puesto de gobierno original. La embarcación se puede seguir gobernando desde las palancas de acelerador originales, el joystick original y los mandos estándar del puesto de gobierno cuando el método de integración seleccionado lo permite.
Asistente de configuración e instalación integrado
PILOT-H PRO incluye una interfaz de configuración y un asistente de instalación integrados. El proceso de configuración guía al instalador por los pasos de configuración más importantes, ayudando a reducir el tiempo de instalación y a evitar complejidad innecesaria.
Las funciones de configuración y supervisión son accesibles desde cualquier dispositivo con Wi-Fi mediante un navegador web estándar. Para una configuración normal no se requiere una aplicación móvil específica, un programa especial para PC, una clave de licencia, un cable de diagnóstico ni una herramienta de programación externa.
Este enfoque basado en navegador mejora la mantenibilidad a largo plazo. El sistema sigue siendo independiente de la disponibilidad en tiendas de aplicaciones, las actualizaciones de los sistemas operativos móviles, el software descontinuado o las herramientas de programación especiales. Esto es especialmente importante para los sistemas marinos que deben permanecer operativos durante muchos años.
Arquitectura de seguridad de grado industrial
PILOT-H PRO está desarrollado con un fuerte enfoque en la seguridad operativa. El sistema utiliza una arquitectura de grado industrial con lógica de control redundante y componentes eléctricos de alta calidad adecuados para entornos marinos exigentes.
El sistema incorpora dos microcontroladores independientes. Cada vía de control utiliza dos relés independientes conectados en serie. Este diseño orientado a la seguridad ayuda a reducir el riesgo de activación de salida no deseada y favorece un funcionamiento fiable en instalaciones marinas profesionales.
PILOT-H PRO utiliza una potente señal inalámbrica codificada combinada con un método de transmisión basado en código de Hamming. Este principio de comunicación está diseñado para proporcionar una fuerte resistencia a las interferencias de radio y ayudar a evitar la activación no deseada por señales de radio externas.
Antes del envío, cada sistema PILOT-H PRO se prueba individualmente para verificar el funcionamiento inalámbrico. El alcance operativo estándar es de hasta 100 metros. En condiciones de espacio abierto, el sistema puede alcanzar distancias notablemente mayores, hasta aproximadamente 500 metros, dependiendo del entorno, la posición de la antena, las condiciones de instalación y los obstáculos circundantes.
Un botón de parada de emergencia diseñado tomando como referencia los principios de parada de emergencia de la norma ISO 13850 forma parte del sistema.
Transmisor y receptor marinos fiables
El transmisor PILOT-H PRO está diseñado para un uso marino exigente. La carcasa del transmisor tiene clasificación IP65 y flota en el agua, lo que ayuda a proteger el dispositivo en entornos húmedos y expuestos.
El transmisor se alimenta con dos pilas AA y está pensado para un largo tiempo de funcionamiento sin recarga. Según las condiciones de uso, las pilas pueden proporcionar hasta 12 meses de funcionamiento. Un LED en el transmisor indica el estado de las pilas.
El receptor está construido en una carcasa robusta de policarbonato industrial. Los LED de estado en el receptor facilitan la resolución rápida de averías, las comprobaciones de instalación y el diagnóstico del sistema.
Control remoto de atraque desde la mejor posición a bordo
Durante el atraque, el amarre, el atraque de popa, el fondeo o las maniobras en solitario, la mejor visión no suele estar desde el puesto de gobierno principal. PILOT-H PRO permite al patrón controlar funciones seleccionadas del yate desde una posición más práctica a bordo, como la bañera de popa, la cubierta lateral, la plataforma de baño o la zona de proa, según la embarcación y la situación operativa.
El sistema puede controlar los motores principales, la hélice de proa, la hélice de popa, el molinete de ancla y la bocina, dependiendo de la configuración seleccionada. Esto proporciona al patrón una mejor visibilidad del muelle, el pantalán, los cabos de amarre, la posición del ancla y los obstáculos circundantes durante el manejo del yate en espacios reducidos.
Para embarcaciones con dos motores, PILOT-H PRO puede facilitar maniobras precisas a baja velocidad permitiendo al operador controlar las funciones de los motores de babor y estribor por separado. Con la respuesta del motor calibrada en dos etapas, el patrón puede usar una primera etapa suave para el posicionamiento fino y una segunda etapa más fuerte cuando se requiere empuje adicional.
Joystick de atraque opcional para PILOT-H PRO
PILOT-H PRO puede combinarse con un joystick de atraque Maritronix opcional. El joystick ofrece al patrón una forma más natural e intuitiva de controlar el yate durante las maniobras en espacios reducidos. En lugar de pulsar botones separados para los motores y las hélices, el joystick puede utilizarse para indicar la dirección de movimiento deseada de la embarcación, dependiendo de la configuración del sistema instalado.
La opción de joystick es especialmente útil para embarcaciones con dos motores y hélice de proa y popa. Permite un control más cómodo durante el desplazamiento lateral, la corrección diagonal, la rotación, el atraque de popa y las maniobras precisas en marina. Para las instalaciones PILOT-H PRO, el joystick también puede aprovechar mejor la lógica de respuesta proporcional del motor en dos etapas.
Dependiendo de la configuración de la embarcación, el joystick puede controlar los motores, la hélice de proa, la hélice de popa o una combinación de estas funciones. Maritronix comprueba la configuración de cada embarcación antes de la entrega para seleccionar la lógica de control y el método de integración adecuados.
PILOT-H estándar vs PILOT-H PRO
El sistema PILOT-H estándar está diseñado para un control inalámbrico fiable de motores, hélice de proa, hélice de popa, molinete de ancla y bocina. Es ideal para usuarios que necesitan un mando inalámbrico de atraque robusto con funcionalidad segura de engranaje conectado / desconectado.
PILOT-H PRO está pensado para usuarios que desean un control de motor más avanzado. Añade una respuesta proporcional del motor en dos etapas calibrada para maniobras más precisas a baja velocidad. Esto convierte a la versión PRO en la solución preferida para embarcaciones en las que se requiere un control de empuje más preciso.
| Característica | PILOT-H Estándar | PILOT-H PRO |
| Control del motor | Control estándar de engranaje conectado / desconectado | Respuesta proporcional del motor en dos etapas calibrada |
| Funcionamiento de los botones | Botones de control de motor de una sola etapa | Botones de control de motor de dos etapas con dos puntos de presión |
| Maniobras a baja velocidad | Control a velocidad de ralentí | Velocidad de ralentí más nivel de empuje calibrado más fuerte |
| Mejor caso de uso | Atraque, fondeo, control inalámbrico básico | Atraque más preciso, corrección de viento, corrección de corriente, embarcaciones más pesadas |
| Opción de joystick | Opcional | Opcional |
| Configuración | Configuración basada en navegador | Configuración basada en navegador |
¿Por qué elegir PILOT-H PRO?
PILOT-H PRO está pensado para propietarios de yates, patrones, instaladores, astilleros y profesionales marinos que desean algo más que un mando inalámbrico de atraque básico. Combina respuesta proporcional del motor en dos etapas calibrada, botones de control de motor de dos etapas, control de joystick opcional, integración basada en gateway, tratamiento de señales analógicas, configuración basada en navegador, comunicación de radio codificada, diseño compacto del receptor y arquitectura de seguridad de grado industrial en un único sistema profesional.
El sistema es especialmente útil durante el atraque, desatraque, fondeo, amarre, atraque de popa, maniobras en solitario, desplazamiento lateral, operación en marinas estrechas y situaciones en las que el patrón necesita mejor visibilidad desde fuera del puesto de gobierno principal.
Para muchos yates modernos y embarcaciones a motor, PILOT-H PRO ofrece una solución profesional para el control inalámbrico de yates con una respuesta del motor más precisa que los sistemas estándar de mando a distancia de encendido/apagado. Es la versión preferida para usuarios que desean un control más suave, mayor autoridad de maniobra y mejor adaptabilidad a distintos tamaños de embarcación y configuraciones de propulsión.
Póngase en contacto con Maritronix enviando fotografías de su palanca de acelerador, puesto de gobierno, sistema de control del motor, sistema de joystick, hélice de proa, hélice de popa y mandos del molinete de ancla. Maritronix verificará la configuración y le ayudará a seleccionar el método de integración adecuado para su embarcación.
